**Based on materials by Katy Huff, Rachel Slaybaugh, and Anthony
Scopatz**
-
+
# What is testing?
Software testing is a process by which one or more expected behaviors
# Exercise
-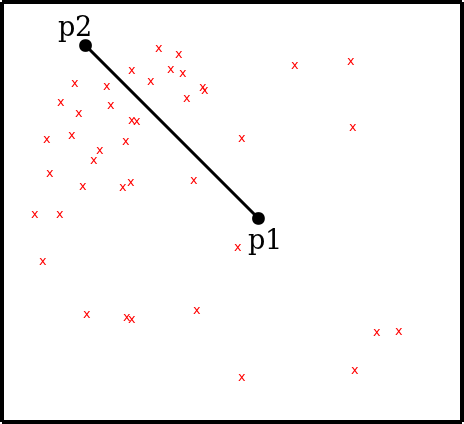
+**The Problem:** In 2D or 3D, we have two points (p1 and p2) which
+define a line segment. Additionally there exists experimental data which
+can be anywhere in the domain. Find the data point which is closest to
+the line segment.
+
+
+In the `close_line.py` file there are four different implementations
+which all solve this problem. [You can read more about them
+here.](http://inscight.org/2012/03/31/evolution_of_a_solution/) However,
+there are no tests! Please write from scratch a `test_close_line.py`
+file which tests the closest\_data\_to\_line() functions. *Hint:* you
+can use one implentation to test another. Below is some sample data to
+help you get started.
+
+```python
+p1 = np.array([0.0, 0.0])
+p2 = np.array([1.0, 1.0])
+data = np.array([[0.3, 0.6], [0.25, 0.5], [1.0, 0.75]])
+```
**Based on materials by Katy Huff, Rachel Slaybaugh, and Anthony Scopatz**
-.. image:: test_prod.jpg
+.. image:: https://github.com/thehackerwithin/UofCSCBC2012/raw/scopz/5-Testing/test_prod.jpg
What is testing?
Exercise
========
-.. image:: http://s3.amazonaws.com/inscight/img/blog/evo_sol1.png
+**The Problem:** In 2D or 3D, we have two points (p1 and p2) which define a line segment.
+Additionally there exists experimental data which can be anywhere in the domain.
+Find the data point which is closest to the line segment.
+
+.. image:: https://github.com/thehackerwithin/UofCSCBC2012/raw/scopz/5-Testing/evo_sol1.png
+
+In the ``close_line.py`` file there are four different implementations which all
+solve this problem. `You can read more about them here.`_ However, there are no tests!
+Please write from scratch a ``test_close_line.py`` file which tests the closest_data_to_line()
+functions. *Hint:* you can use one implentation to test another. Below is some sample data
+to help you get started.
+
+.. _You can read more about them here.: http://inscight.org/2012/03/31/evolution_of_a_solution/
+
+.. code-block:: python
+
+ p1 = np.array([0.0, 0.0])
+ p2 = np.array([1.0, 1.0])
+ data = np.array([[0.3, 0.6], [0.25, 0.5], [1.0, 0.75]])
--- /dev/null
+import numpy as np
+from scipy.optimize import fmin
+
+#
+# Attempt 1
+#
+
+def point_on_line1(x, p1, p2):
+ y = p1[1] + (x - p1[0])*(p2[1] - p1[1]) / (p2[0] - p1[0])
+ return np.array([x, y])
+
+
+def dist_from_line1(x, pdata, p1, p2):
+ pline = point_on_line1(x, p1, p2)
+ return np.sqrt(np.sum((pline - pdata)**2))
+
+
+def closest_data_to_line1(data, p1, p2):
+ dists = np.empty(len(data), dtype=float)
+ for i, pdata in enumerate(data):
+ x = fmin(dist_from_line1, p1[0], (pdata, p1, p2), disp=False)[0]
+ dists[i] = dist_from_line1(x, pdata)
+ imin = np.argmin(dists)
+ return imin, data[imin]
+
+
+#
+# Attempt 2
+#
+
+def dist_from_line2(pdata, p1, p2):
+ a = np.sqrt(np.sum((p1 - pdata)**2))
+ b = np.sqrt(np.sum((p2 - pdata)**2))
+ c = np.sqrt(np.sum((p2 - p1)**2))
+ h = a * np.sqrt(1.0 - ((a**2 + c**2 - b**2) / (2.0 * a * c))**2)
+ return h
+
+def closest_data_to_line2(data, p1, p2):
+ dists = np.empty(len(data), dtype=float)
+ for i, pdata in enumerate(data):
+ dists[i] = dist_from_line2(pdata, p1, p2)
+ imin = np.argmin(dists)
+ return imin, data[imin]
+
+#
+# Attempt 3
+#
+
+def perimeter3(pdata, p1, p2):
+ a = np.sqrt(np.sum((p1 - pdata)**2))
+ b = np.sqrt(np.sum((p2 - pdata)**2))
+ c = np.sqrt(np.sum((p2 - p1)**2))
+ return (a + b + c)
+
+def closest_data_to_line3(data, p1, p2):
+ peris = np.empty(len(data), dtype=float)
+ for i, pdata in enumerate(data):
+ peris[i] = perimeter3(pdata, p1, p2)
+ imin = np.argmin(peris)
+ return imin, data[imin]
+
+#
+# Attempt 4
+#
+
+def closest_data_to_line4(data, p1, p2):
+ return data[np.argmin(np.sqrt(np.sum((p1 - data)**2, axis=1)) + \
+ np.sqrt(np.sum((p2 - data)**2, axis=1)))]
+
{kind=link}